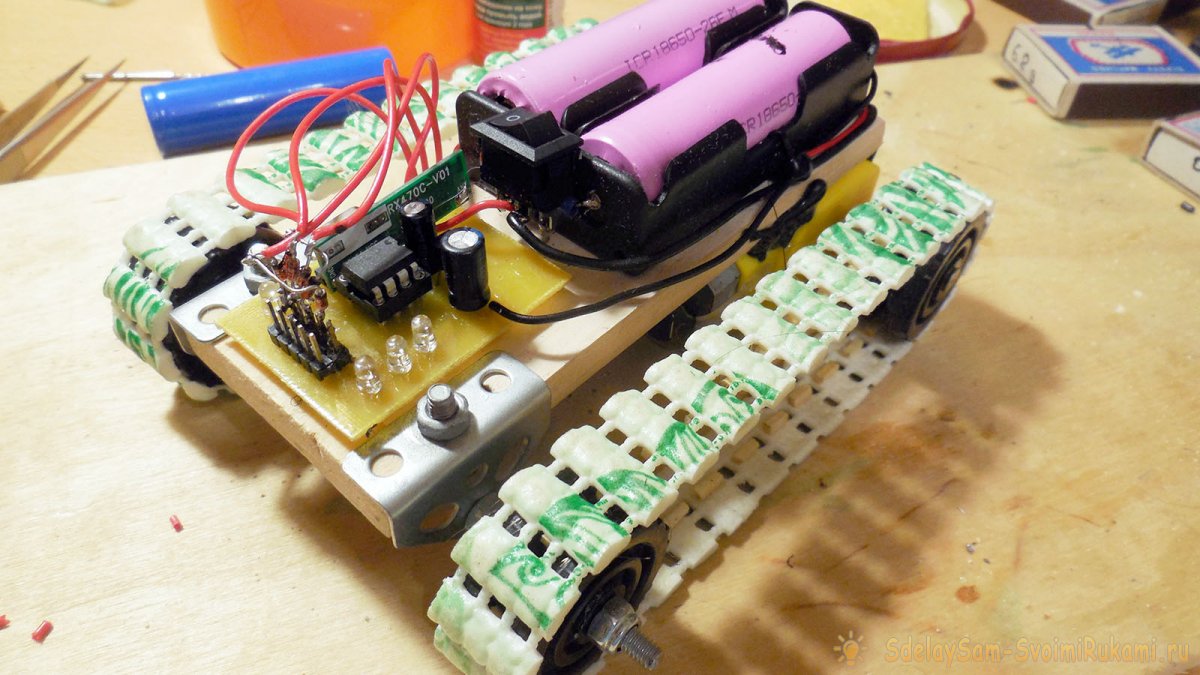
Рассмотрим создание машинки на гусеничном ходу с довольно элементарной конструкцией, собрать которую можно буквально за пару вечеров. Всю конструкцию условно можно разделить на две части – гусеничное шасси и электрическая часть, которая будет обеспечивать дистанционное управление машинкой с пульта.
Изготовление шасси
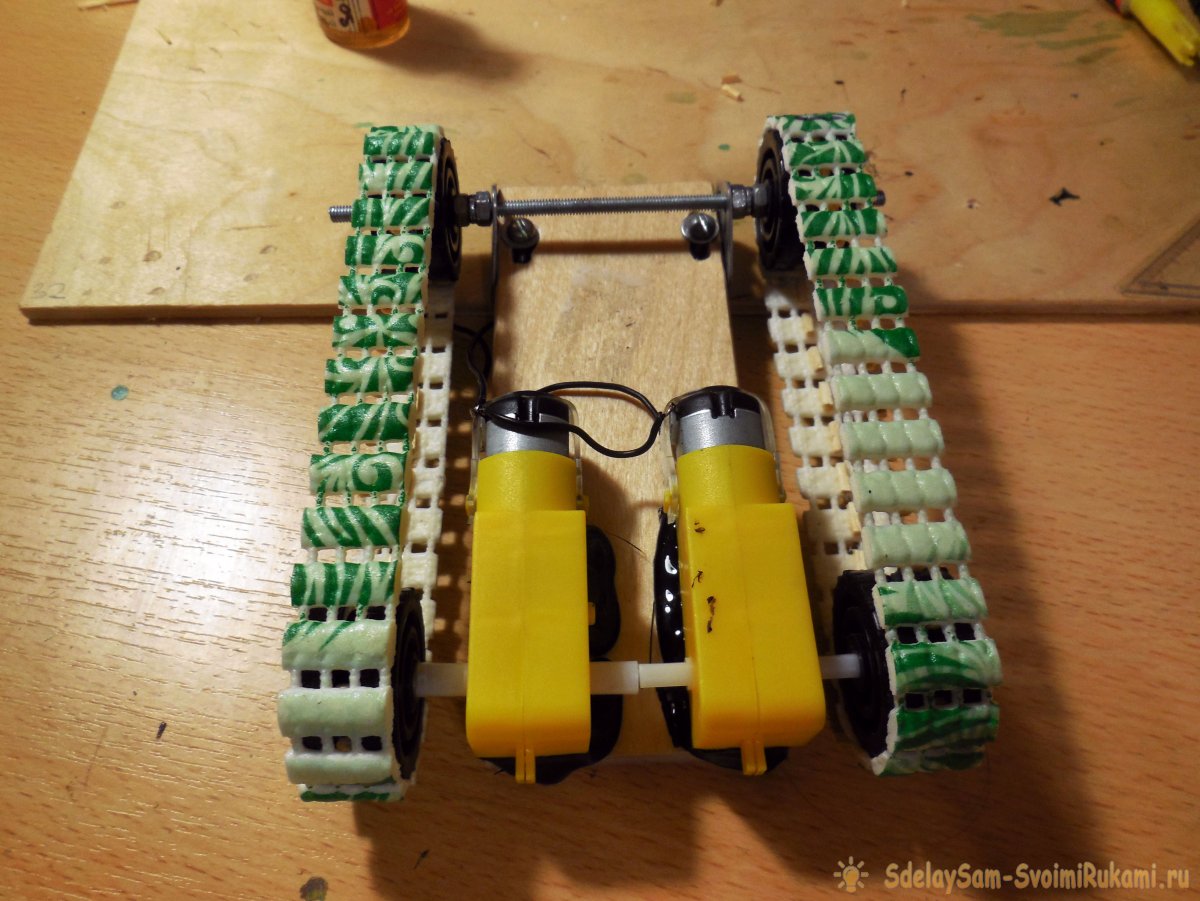
Понадобится не так много материалов: приводиться в движение гусеницы будут с помощью пары мотор-редукторов, основой всей конструкции будет небольшой кусок толстой фанерки, также понадобится несколько пластиковых колёсиков, по которым и будут вращаться гусеницы. Для машинки можно использовать практически любые подходящие по размеру мотор-редукторы, идеально подойдут «жёлтые», которые можно встретить во многих магазинах радиодеталей, либо купить на Али, редуктор в них даёт передаточное соотношение 1:48, что для данного случая является самым оптимальным значением.
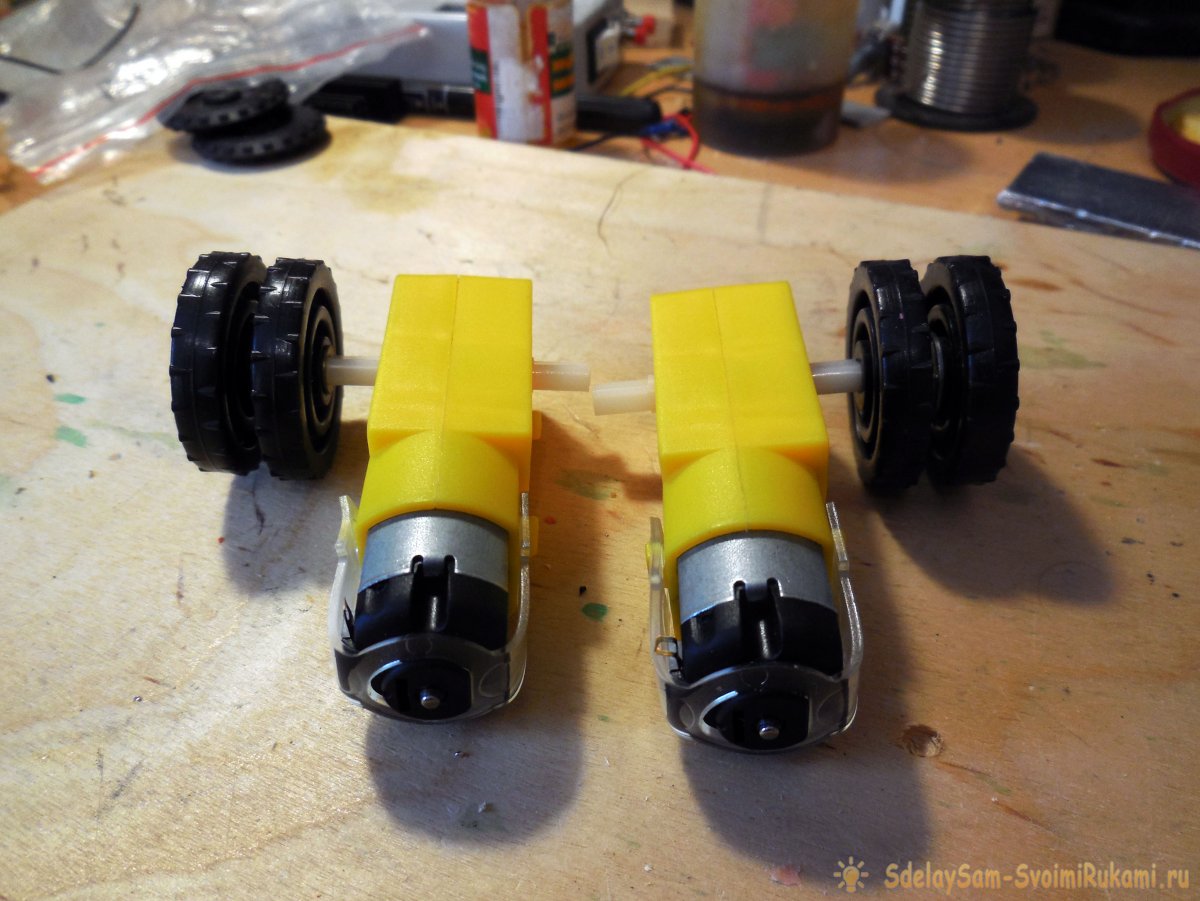
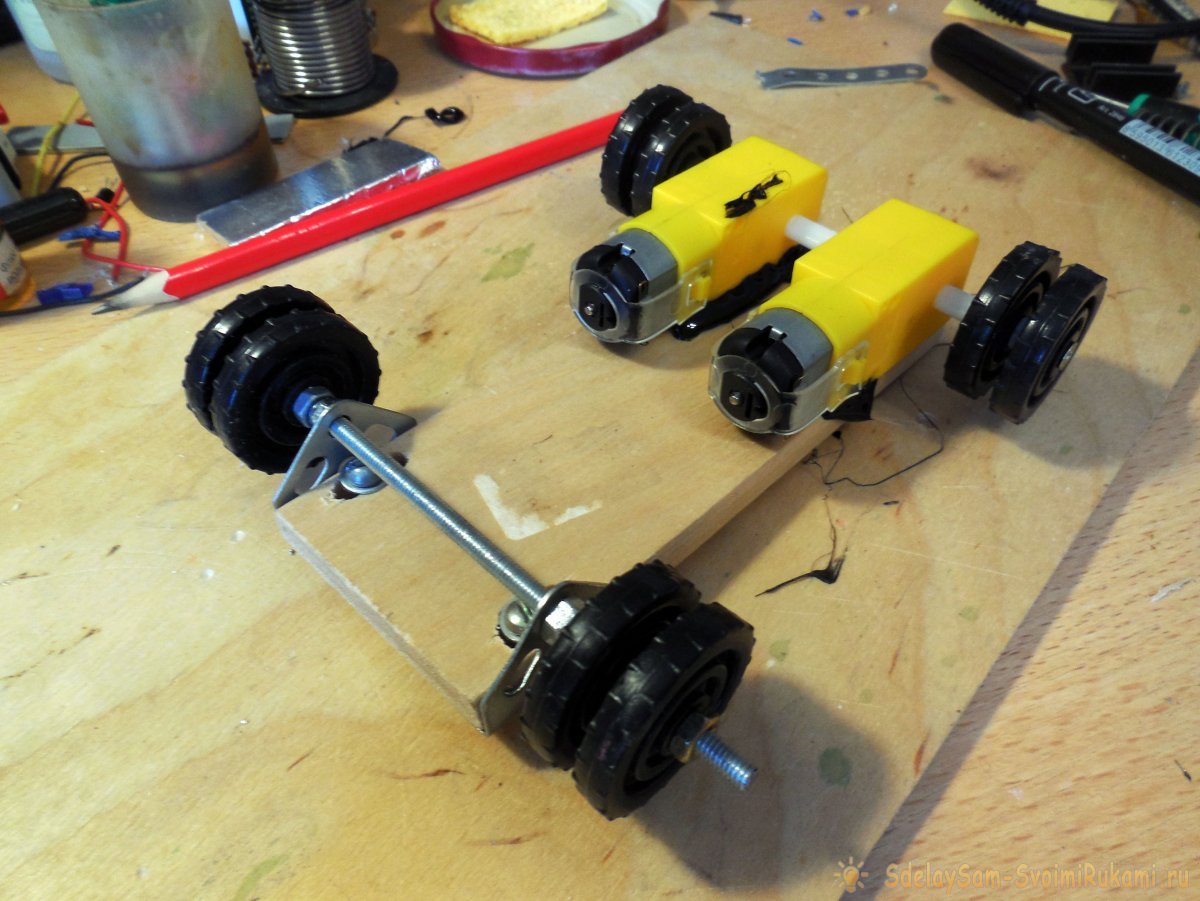
Каждый редуктор имеет выход на два вала, по разные стороны корпуса – для гусеничного шасси задействован будет только один вал с каждого мотора, второй можно удалить вовсе либо оставить на случай, если эти моторы ещё понадобятся в других проектах. На валы необходимо закрепить колёса – сделать это площе всего, вкрутив саморез в сам вал (внутри он полый), таким образом, колёса хорошо зажмутся. Для дополнительной фиксации, и чтобы не раскрутился саморез, можно обильно смазать соединение клеем. Обратите внимание, что колесо двойное – между каждым из колёс делается зазор примерно 3-4 мм, в дальнейшем с его помощью будет фиксироваться гусеница.

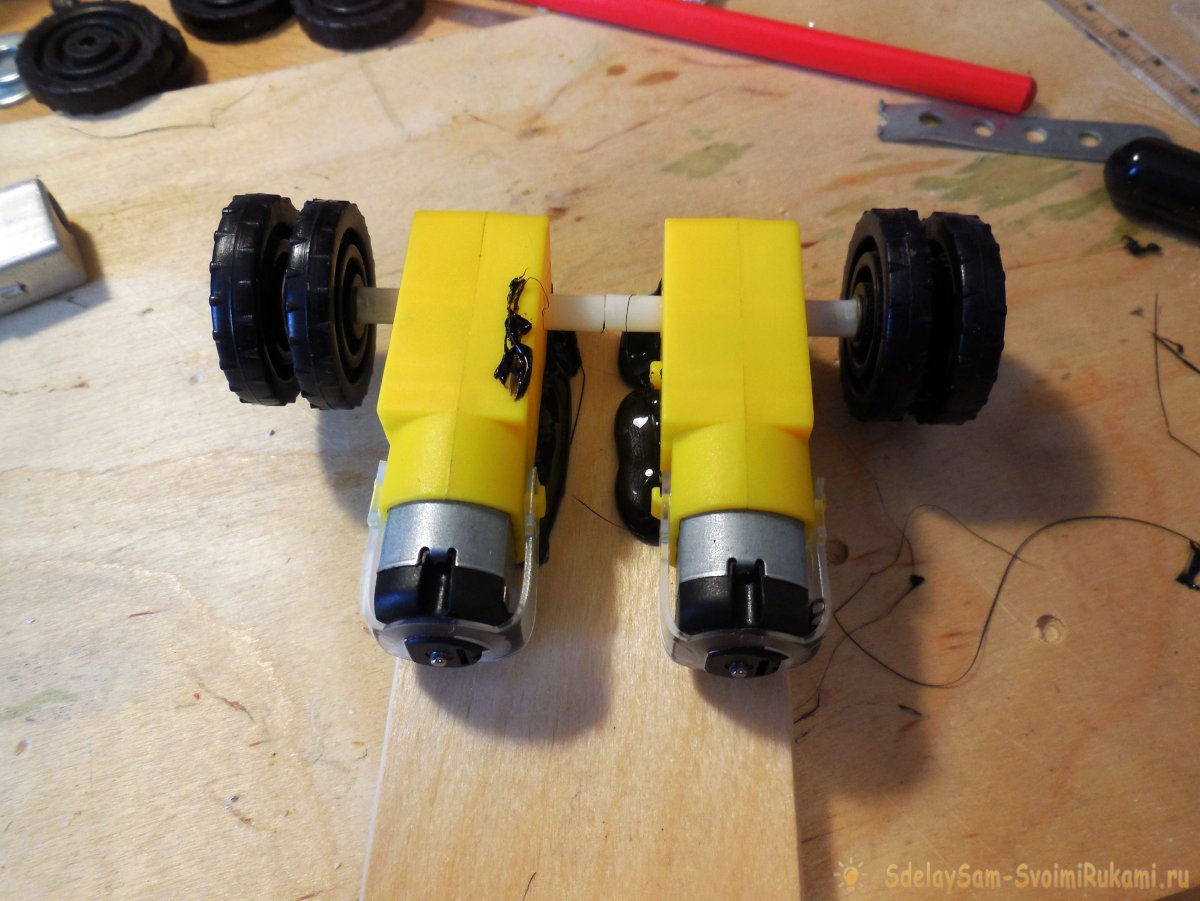
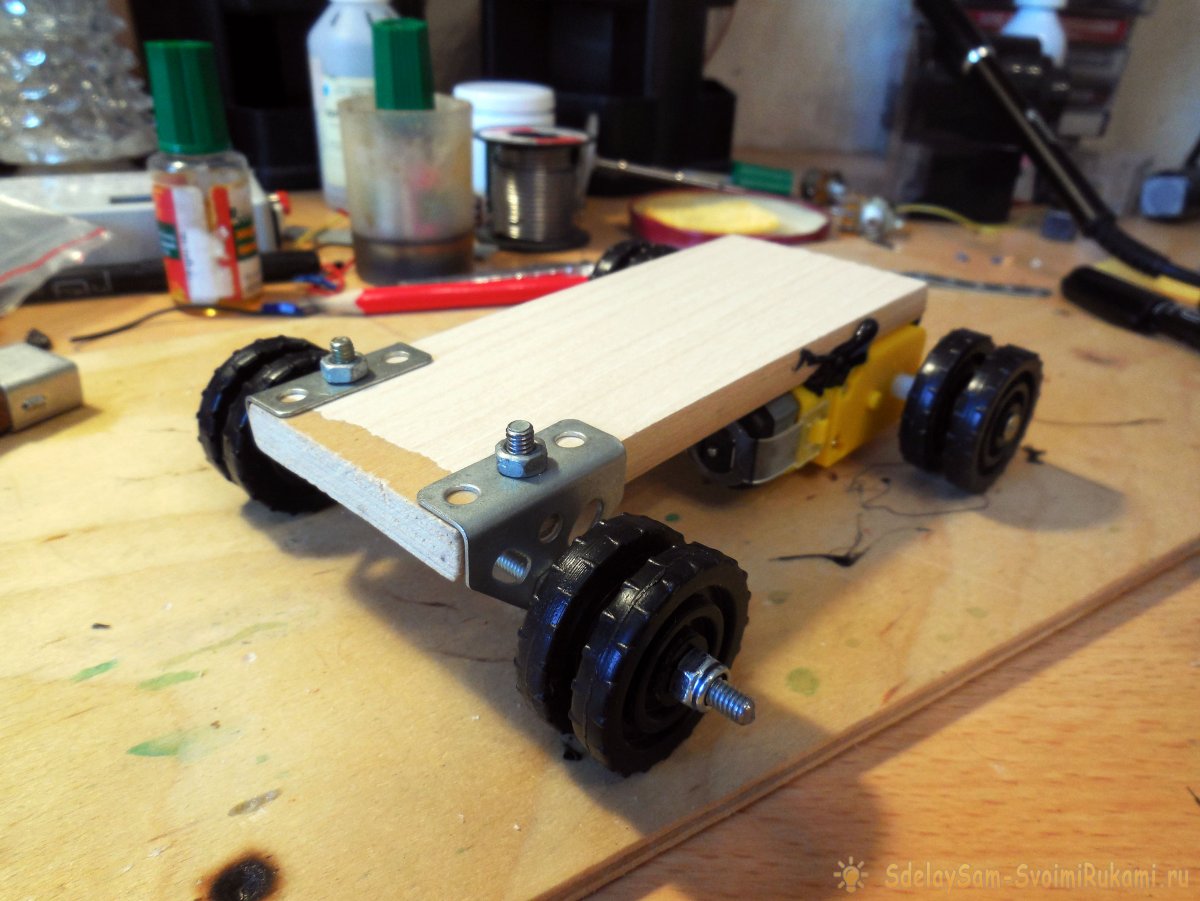
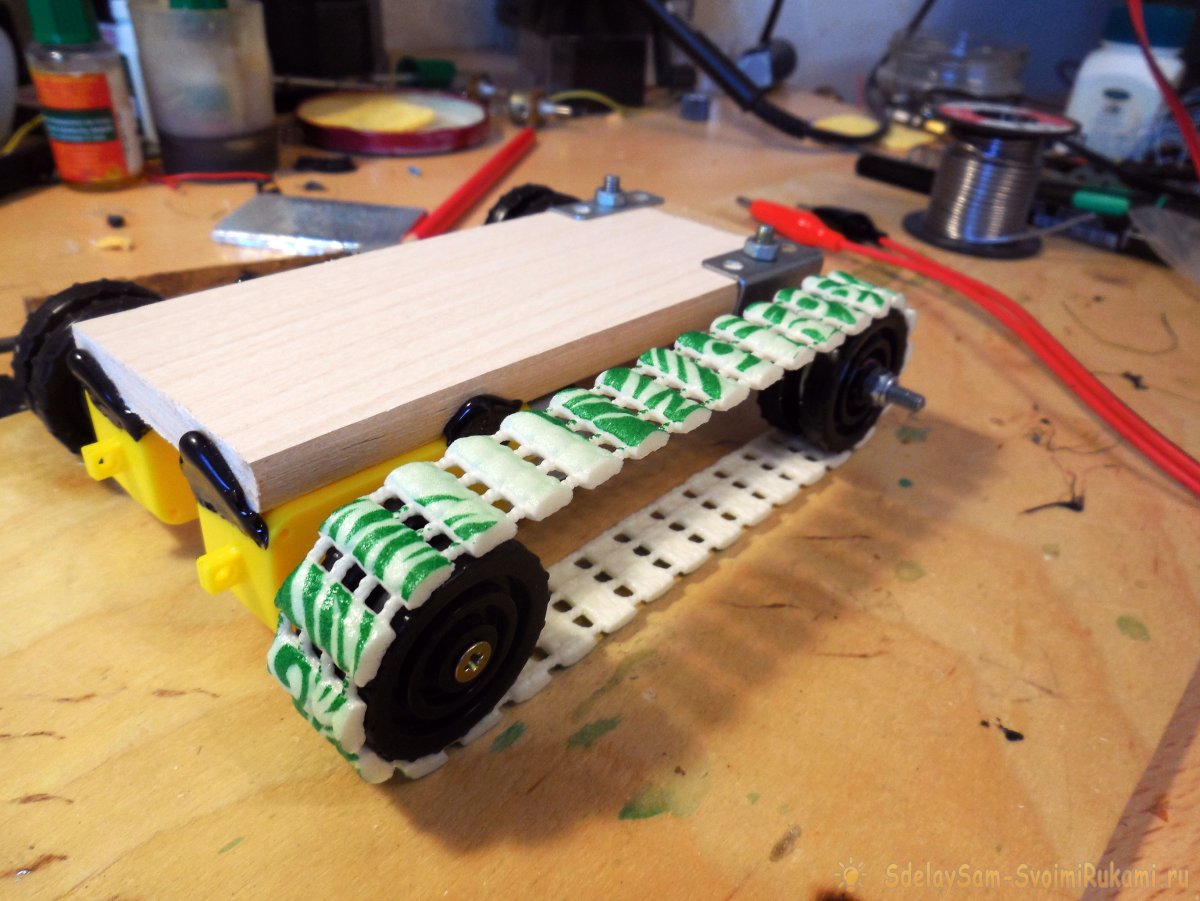
Моторы закрепляются на кусочке прочной фанеры, её размер можно выбрать произвольно, в зависимости от желаемых размеров машинки. Каких-либо удобных мест для крепления данные мотор-редукторы не предусматривают, поэтому зафиксировал я их с помощью термоклея – хорошие клеевые стержни обеспечивают отличное качество соединения, как показал опыт.
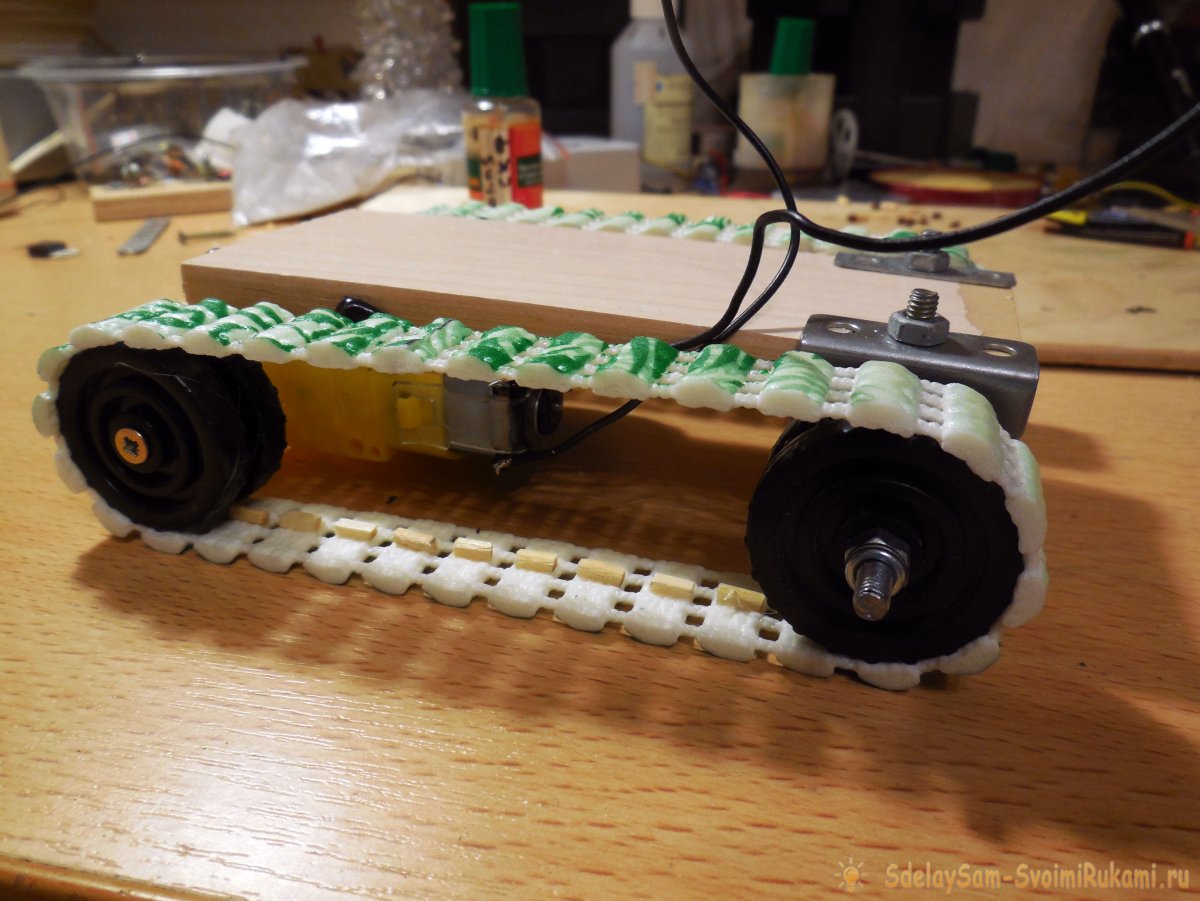
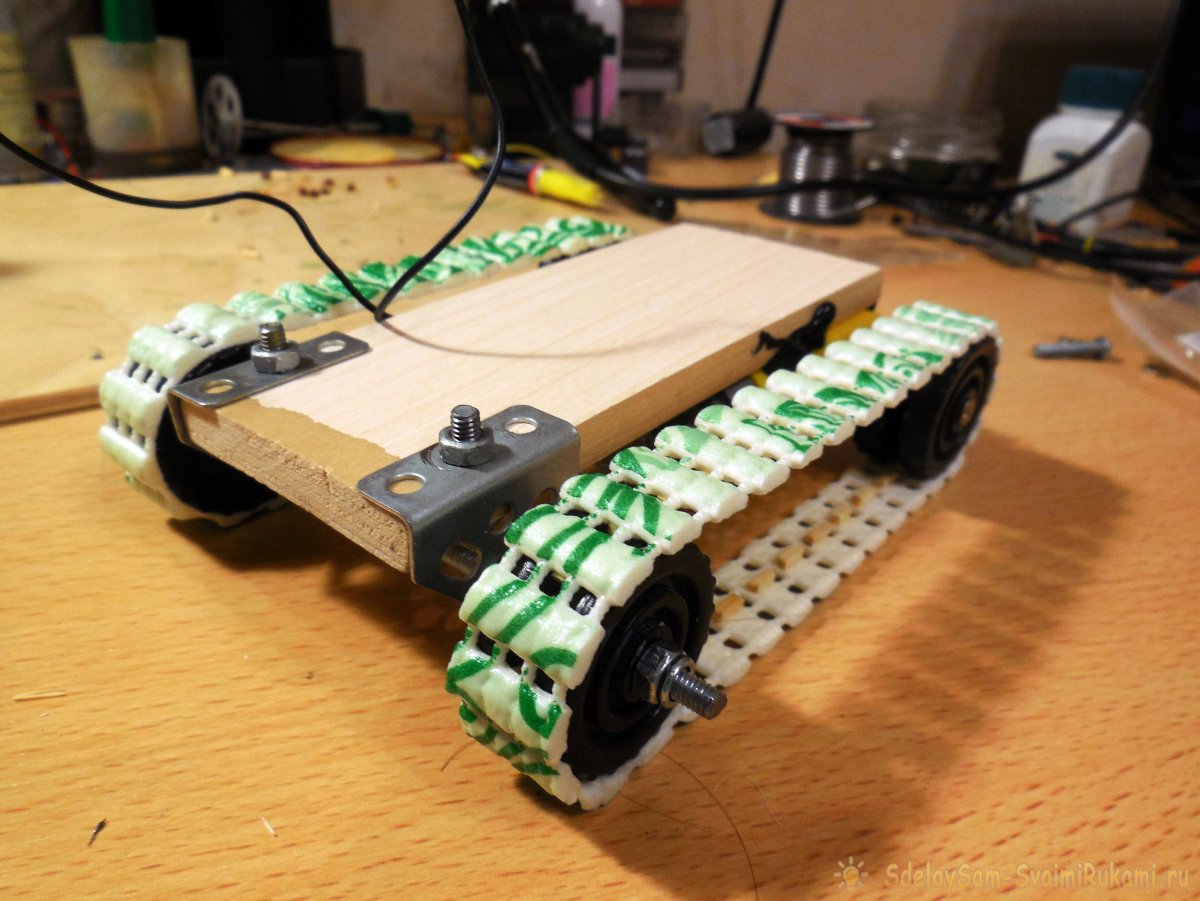
Далее в противоположной стороне от моторов необходимо закрепить уголки для оси передних колёс. Для этого очень рекомендую использовать детали от детского железного конструктора – там можно найти готовые уголки с отверстиями. При сверлении отверстия в фанерке нужно учитывать, что в дальнейшем понадобится регулировка натяжения гусениц, поэтому необходимо просверлить ряд отверстий длиной примерно 1-1,5 см, которые затем соединить в одну продолговатую прорезь. Таким образом, вся передняя ось будет двигаться взад-вперёд, фиксируясь болтами в нужном положении.
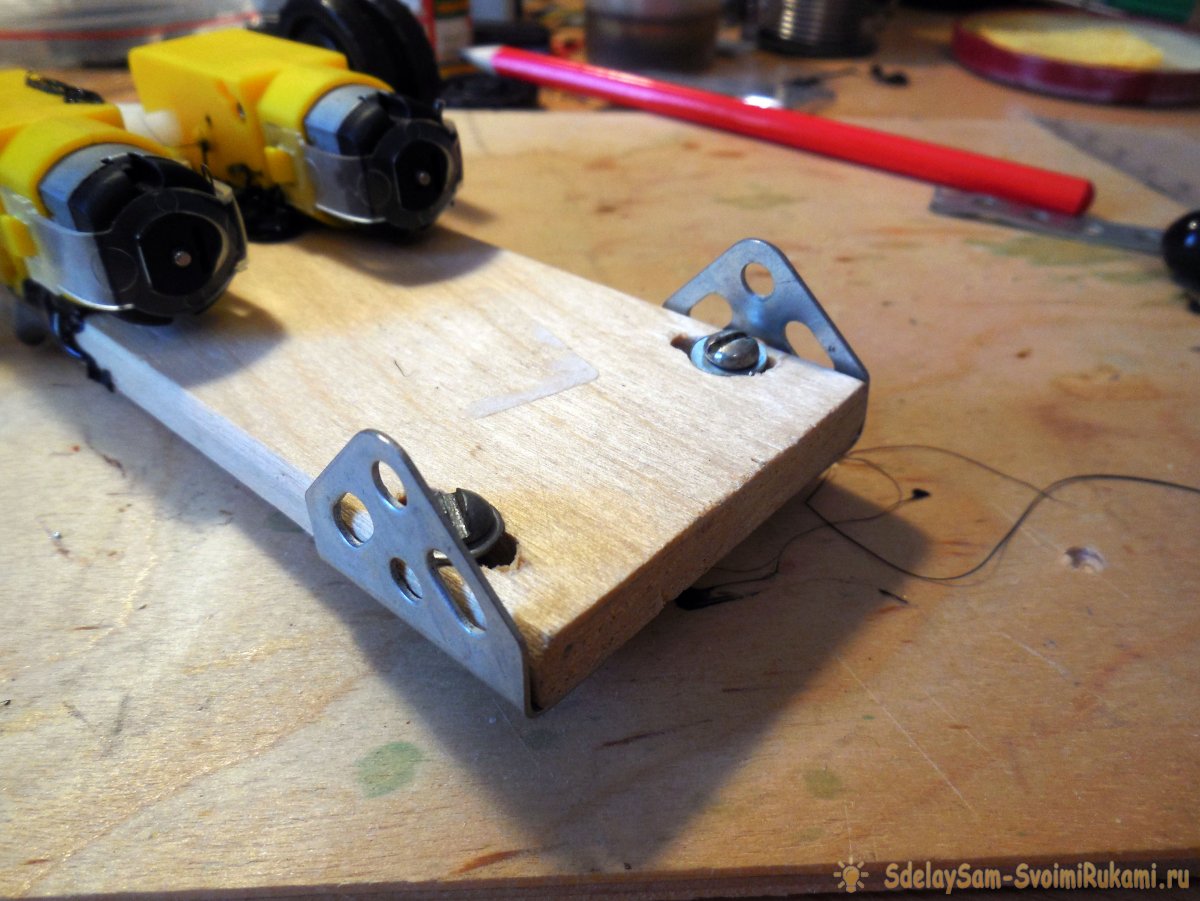
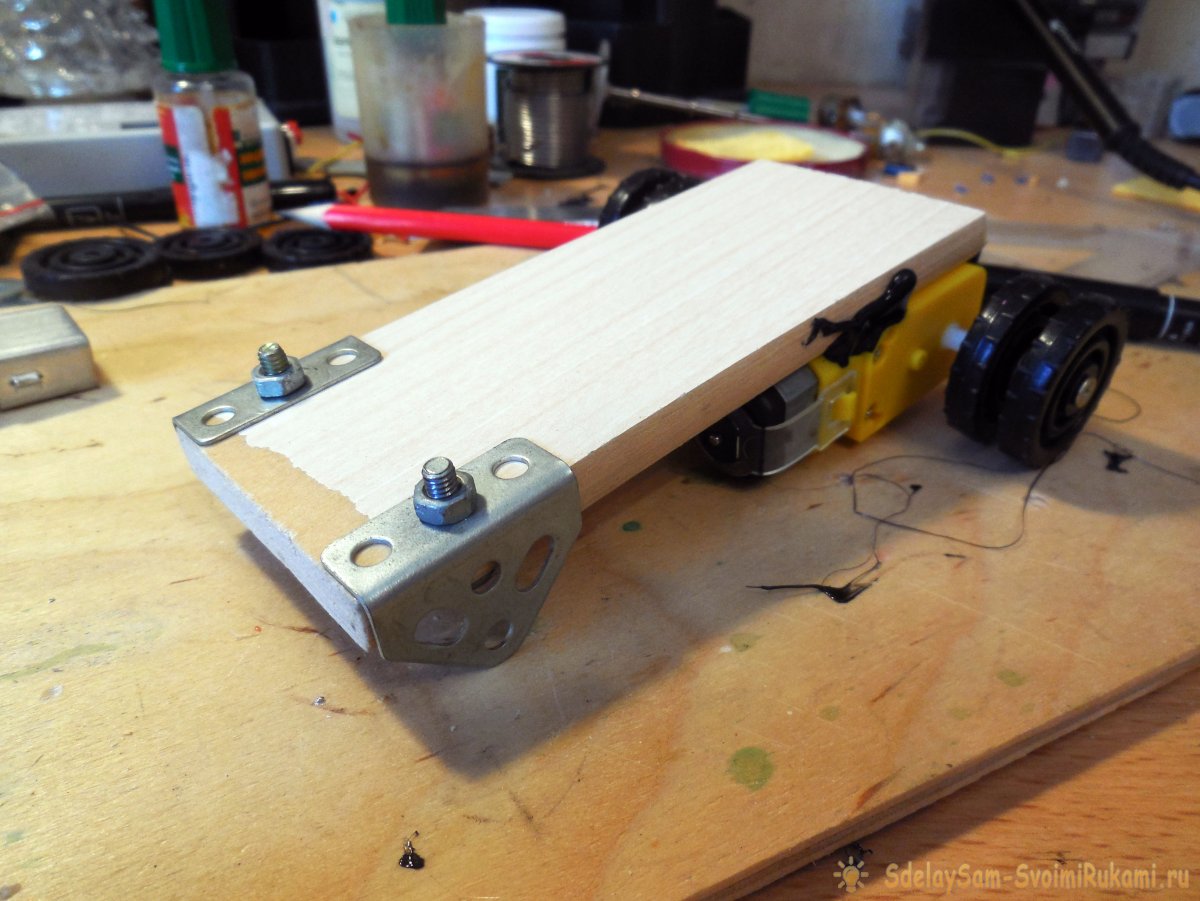
В отверстия в уголках продевается шпилька, удобно использовать м4, она даёт достаточную жёсткость и при этом подходит под отверстия в деталях железного конструктора. Шпильку необходимо жёстко закрепить на уголках, удобно использовать для этого гайки с фиксацией, они не раскрутятся сами собой, когда машинка начнёт ездить. По бокам устанавливаются те же двойные колёса, что и сзади, с точном таким же зазором. Колёса должны свободно вращаться на оси, обеспечить это можно теми же гайками с фиксацией. Обратите внимание, что левые и правые колёса должны вращаться независимо друг от друга. Такие колёса я взял в том же железном конструкторе, однако можно вырезать аналогичные и из пластика, либо из плотного картона, если сложить его в несколько слоёв и склеить.
Изготовление гусениц
Трудно это представить, однако, отличные гусеницы с хорошим сцеплением получаются из ПВХ коврика для ванны, найти его можно практически в любом магазине хозяйственных товаров. Такой коврик состоит из множества гибких «полос», которые соединены между собой параллельно идущими нитями, то что нужно для создания гусеницы. От коврика отрезается лента шириной 1,5-2 см, она должна быть равна ширине используемых колёс.

Затем необходимо приложить ленту к закреплённым на шасси колёсам и отрезать её по необходимой длине, затем концы ленты склеиваются суперклеем. После того, как клей высохнет, можно примерить гусеницу на шасси и даже включить мотор – гусеница будет вращаться, однако быстро спадёт с колёс.
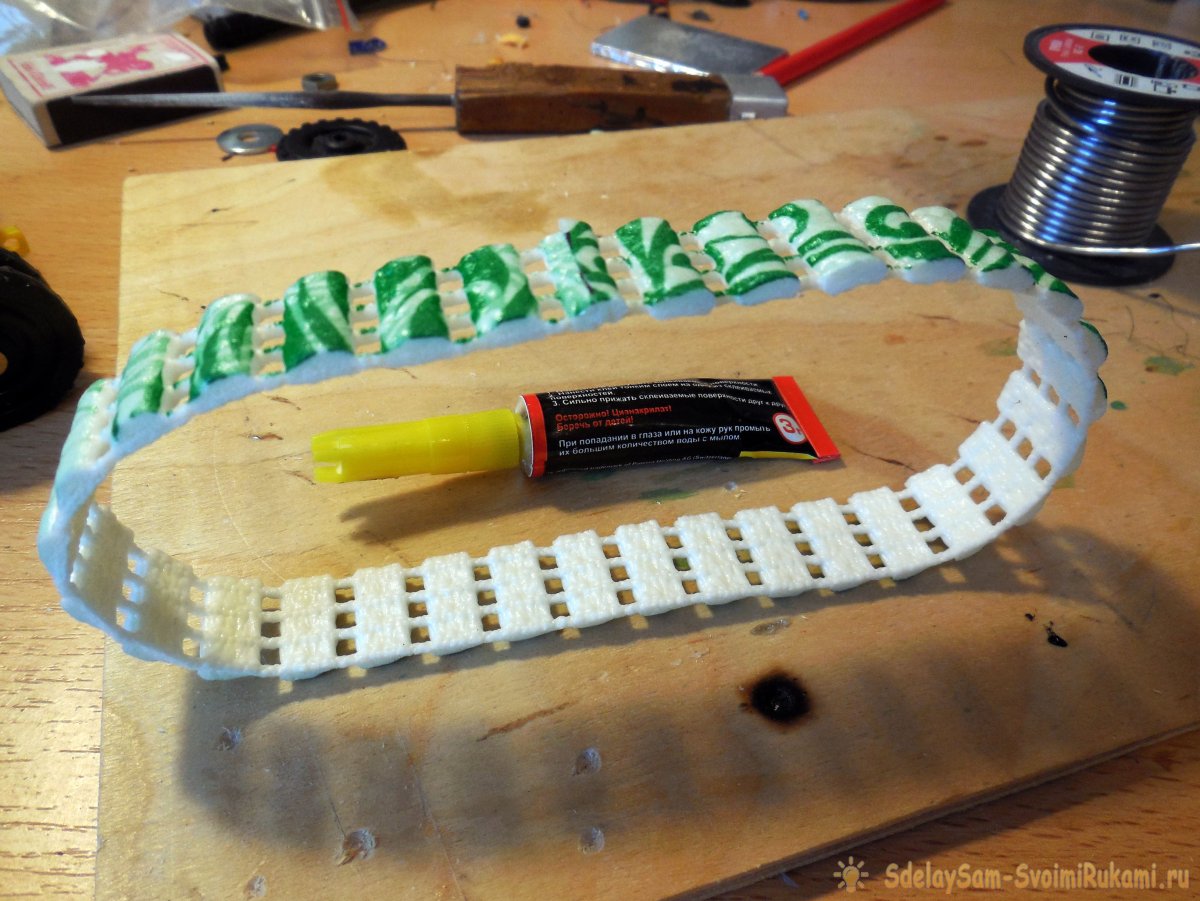
Для того, чтобы гусеница не спадала с колёс, даже когда будущая машинка будет переезжать препятствия, нужно сделать выпуклые упоры по центру гусеницы. При вращении они будут попадать в зазор между колёсами, не давая гусенице сойти. Сделать такие упоры можно множеством способов, я решил приклеить спички на каждый «шаг» гусеницы, как показал опыт, данный способ оказался рабочим и при достаточном натяжении гусеница совершенно не спадала. Спички нарезаются на отрезки длиной 5-6 мм и приклеиваются, как показано на фотографии ниже, используется всё тот же суперклей – он обеспечивает хорошую прочность соединения с материалом ПВХ-коврика.

Все те же действия нужно сделать со второй гусеницей. После наклеивания спичек гусеницы можно считать готовыми – теперь они надеются на шасси и уже можно проверить, как поедет будущая машинка, подав напряжение с аккумулятора напрямую на оба мотора. При необходимости нужно отрегулировать силу натяжения – слишком слабая гусеница будет проворачиваться или спадать, а слишком сильно натянутая будет туго вращаться, оказывая дополнительную нагрузку на мотор.
Электрическая часть
В электрической части понадобится сразу несколько плат: платы приёмника и передатчика для передачи команд с пульта, повышающие преобразователи для питания моторов, а также платы «мосты» для возможности вращения каждого из моторов в обе стороны. Общая схема такова – плата передатчика будет устанавливаться в пульте, плата приёмника на шасси машинки. Повышающие преобразователи преобразуют напряжение с аккумуляторов (3,7 – 4,2 вольта) до уровня 7-8 вольт, от которых уже будут питаться моторы. Если моторы развивают достаточную скорость и напрямую от аккумулятора, то преобразователи можно не ставить. Управлять вращением моторов будут мостовые схемы – специальные схемы с полевыми транзисторами, которые могут подавать на выход напряжение либо одной полярности, либо другой, в зависимости от того, на какой вход (in 1 или in 2) будет приходить управляющий сигнал с платы приёмника. Сперва рассмотрим схемы передатчика и приёмника, они соответственно представлены ниже.
Если быть точным, данные схемы называются кодером и декодером, а в качестве именно приёмника и передатчика выступают готовые модули RX-TX на частоту 433 МГц, которые легко можно купить на Али или многих магазинах радиодеталей - http://ali.pub/5hzb5c Каждый из модулей имеет по три контакта для подключения – плюс питания, минус, а также контакт DATA для передачи или съёма данных. Представленные же выше простые схемы обеспечивают протокол передачи данных, позволяя обрабатывать нажатия 5-ти кнопок. Для управления машинкой понадобится всего 4 канала (вперёд, назад, вправо, влево), поэтому 5-й канал остаётся свободным и его можно задействовать под любые цели, например, включение-выключение фар. Контакты TXD и RXD на схемах подключаются соответственно к контактам DATA передатчика и приёмника, в остальном схемы простые и вряд ли требуют пояснений. Напряжение питания самих схем составляет 3,5-5 вольт, однако если установить стабилизаторы 78l05 (они указаны на схемах), то можно питать от напряжения 7 и более вольт. Печатные платы предусматривают оба варианта питания, нужно лишь установить перемычки в нужных местах. Для использования в машинке питание и приёмника, и передатчика можно осуществлять напрямую от аккумуляторов без стабилизаторов. В каждой из схем имеется микроконтроллер – его необходимо прошить соответствующей прошивкой, прошивки находятся в архиве вместе с файлами плат.
Архив со схемами, прошивками и платами:
Изготовление пульта
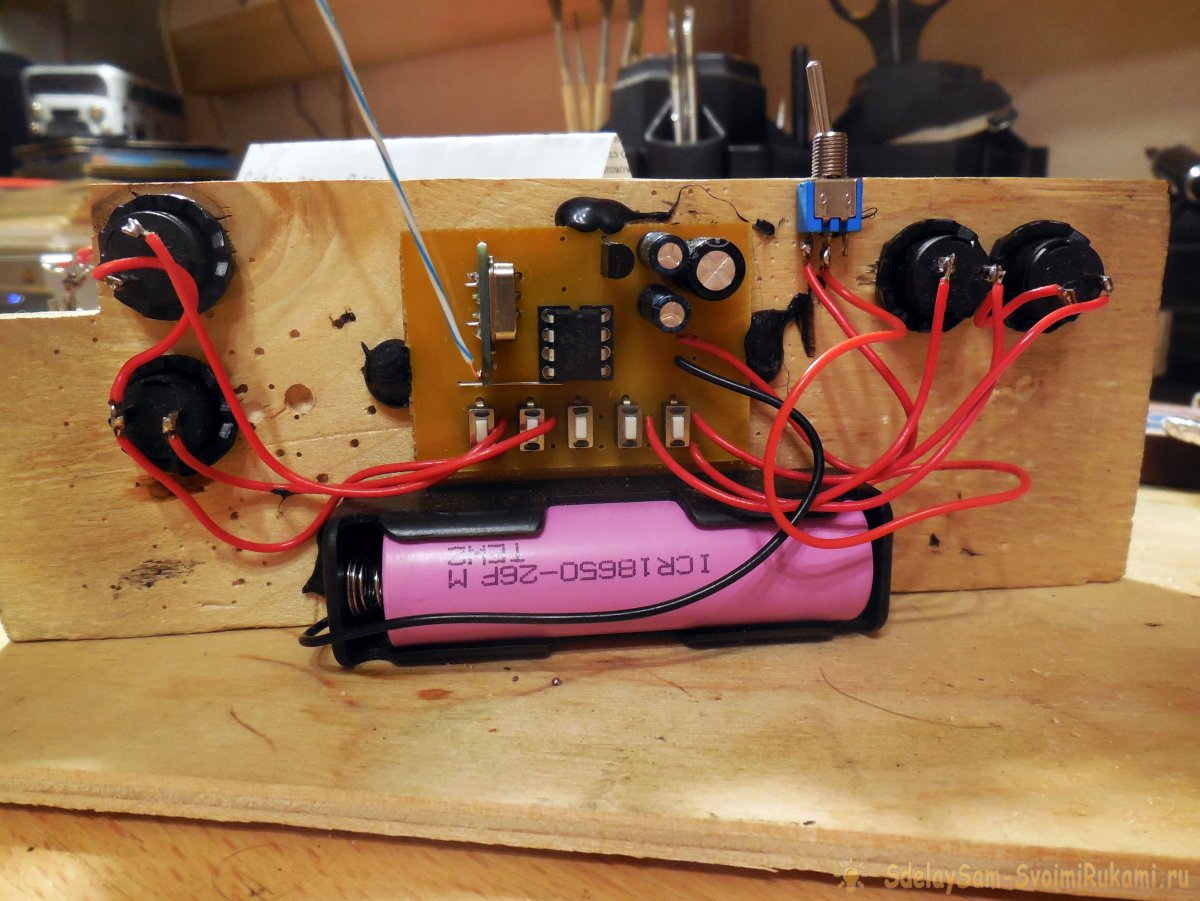
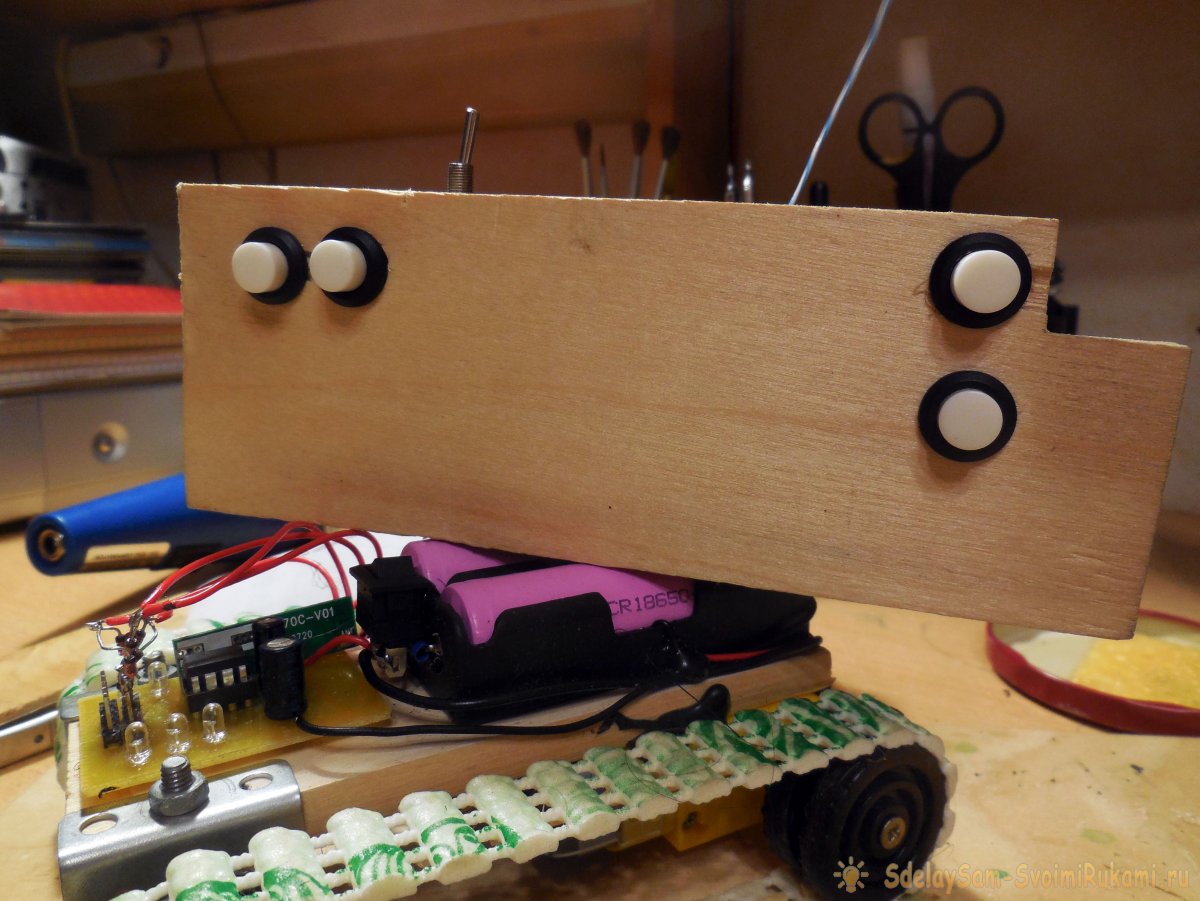
Как один из вариантов – использовать можно готовый пульт от какой-нибудь сломанной/ненужной радиоуправляемой игрушки, если внутри него достаточно места для установки платы кодера. Либо можно изготовить свой пульт, как я и сделал. В качестве основы применил ещё один обрезок фанеры, смонтировав на нём холдер для аккумулятора 18650, плату кодера с модулем-приёмником, а также 4 кнопки, расположив их по максимальному удобству управления. Обратите внимание, что плата кодера уже содержит посадочные места для кнопок на плату – их установка необязательна, разве что для проверки работоспособности после сборки. Рабочие кнопки выводятся с платы на проводах, как на фотографиях ниже.
Монтаж электроники на шасси
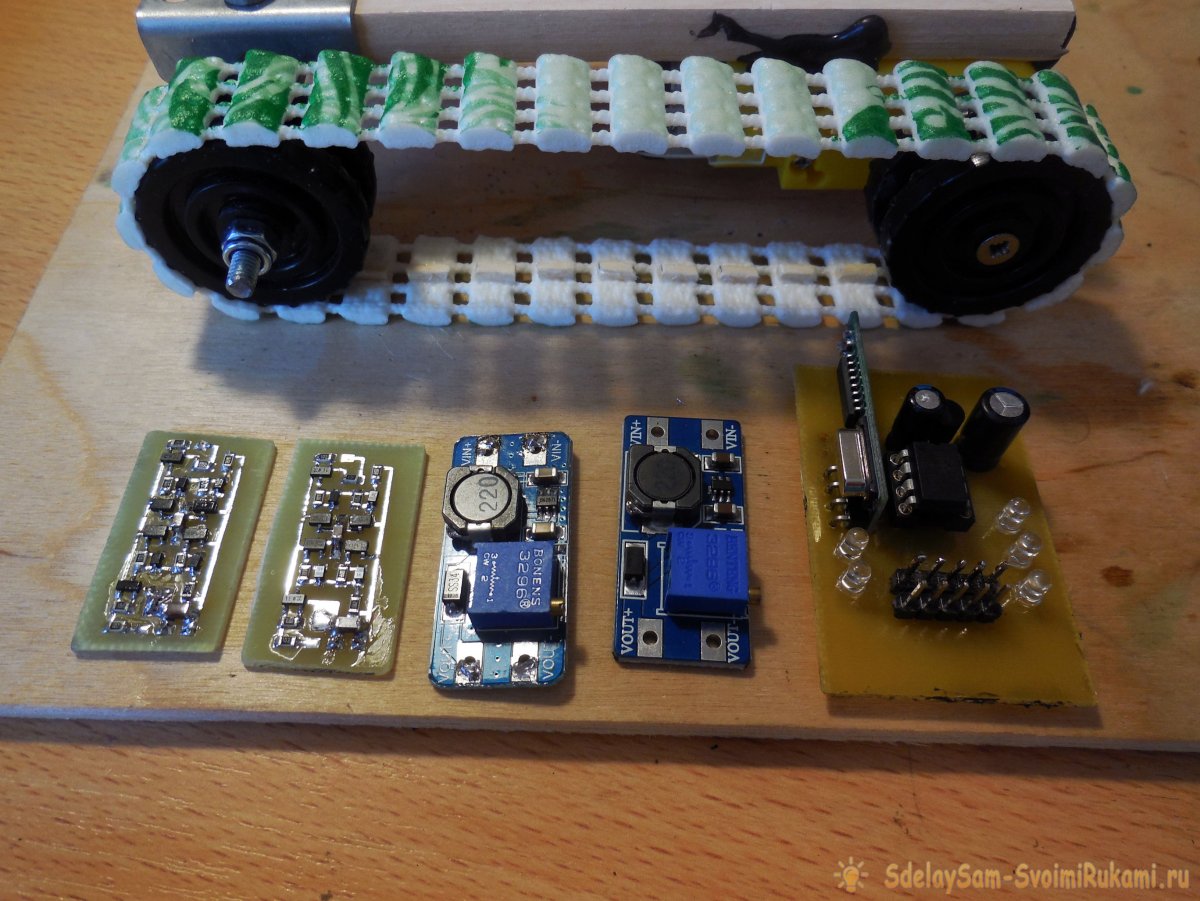
На самом шасси, таким образом, кроме платы декодера с модулем-приёмником будут устанавливаться две платы «мосты», и два преобразователя. Использование двух преобразователей, по одному на каждый мотор, хорошо тем, что можно будет отрегулировать отдельно скорость каждой гусеницы. Мотор-редукторы хоть и одинаковые, но всё же имеют некоторый разброс параметров, поэтому даже при одинаковом питающем напряжении могут давать чуть-чуть разные обороты, подстраивая напряжение на выходе преобразователей можно добиться полностью одинаковой скорости. Перекос же в скоростях, даже небольшой, приведёт к тому, что машинка будет ехать не строго вперёд, а с небольшим поворотом. Ниже на фотографии можно увидеть все платы, необходимые для установки на шасси.
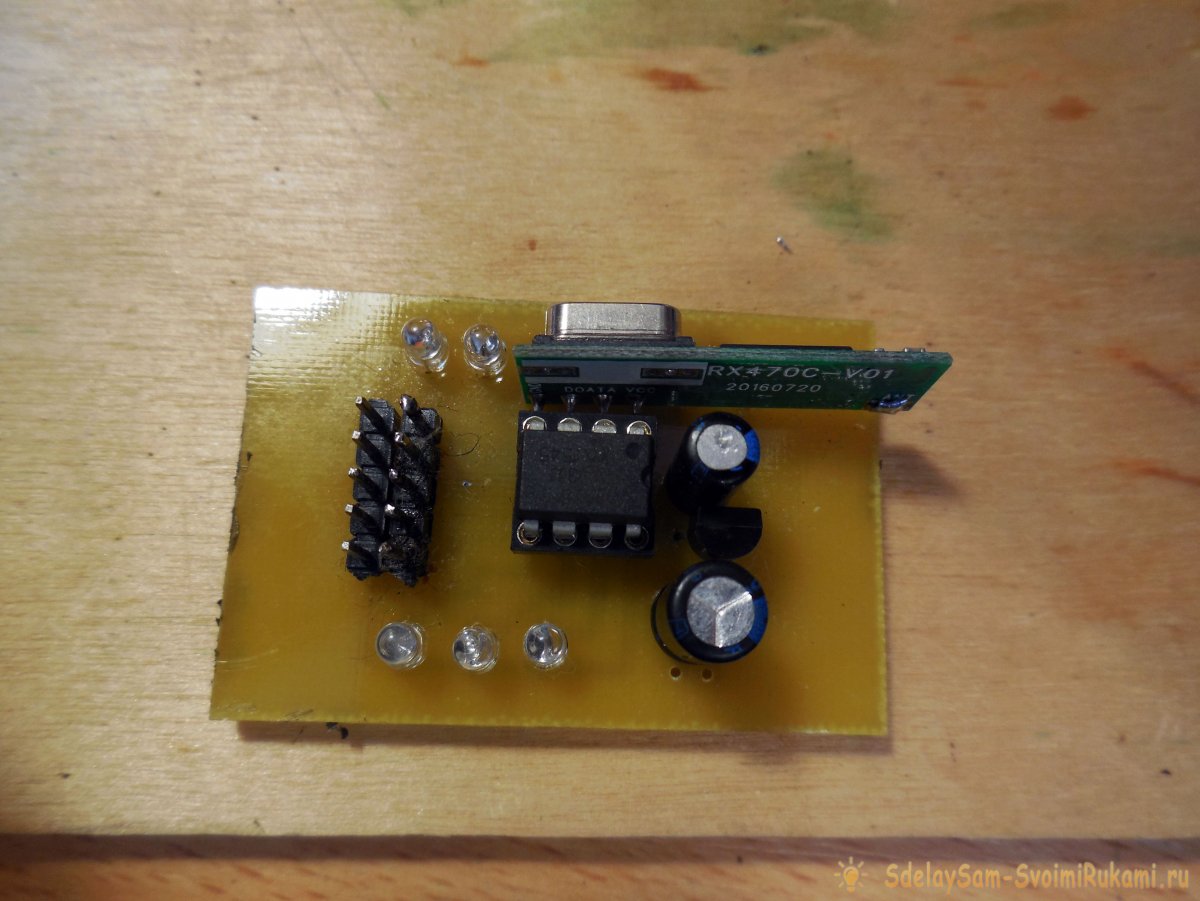
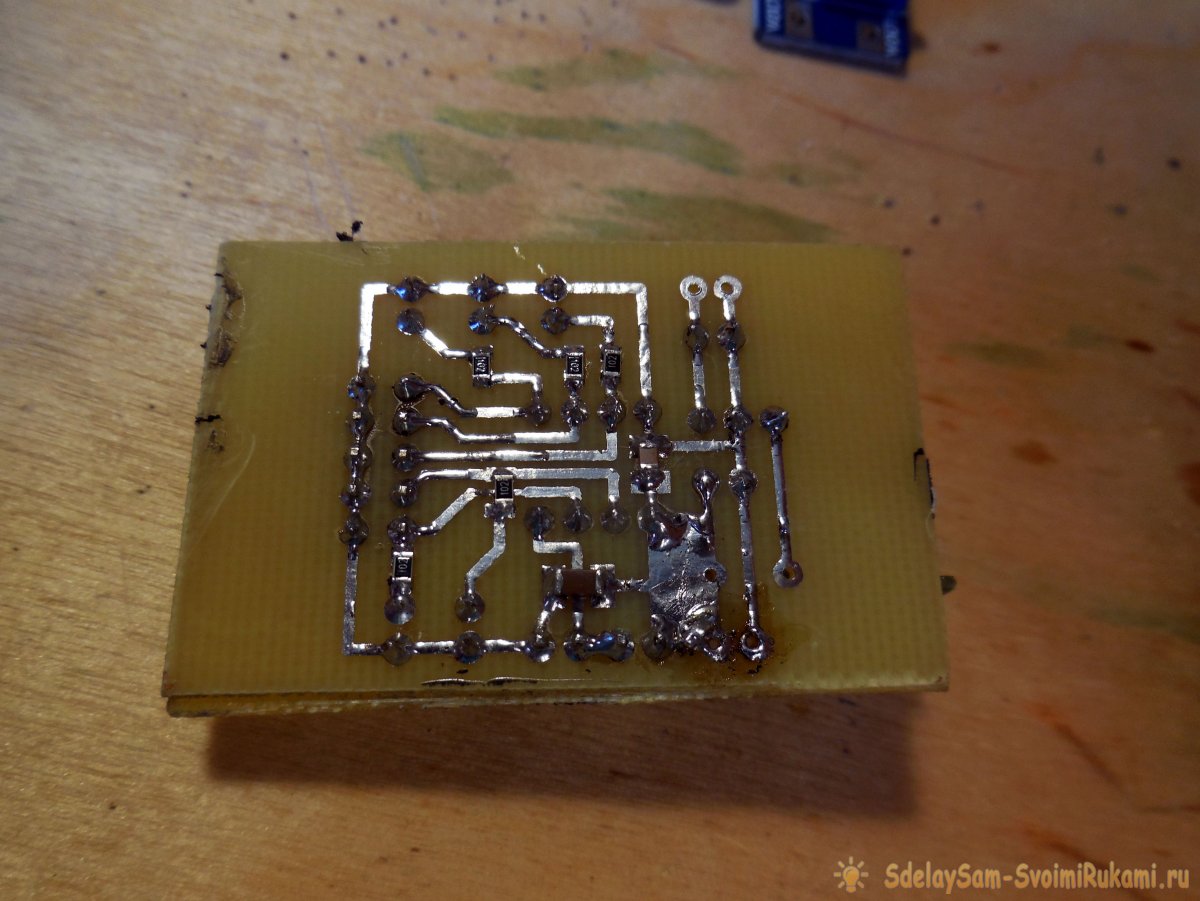
Подробное фото платы декодера. Обратите внимание, что она, так же, как и плата кодера, имеет несколько дополнительных конденсаторов по питанию – они точно не будут лишними в устройствах с микроконтроллерами.
Сборка мостовой схемы
Казалось бы – для чего нужна какая-то мостовая схема, ведь достаточно лишь с помощью ключа подавать напряжение на моторы. И она действительно не нужна в том случае, если машинке не требуется задний ход – а практика показывает, что без него совсем неинтересно. Таким образом, необходимо собрать небольшую дополнительную схемку, которая обеспечит смену полярности для мотора. Меняется полярность – меняется направление движения.
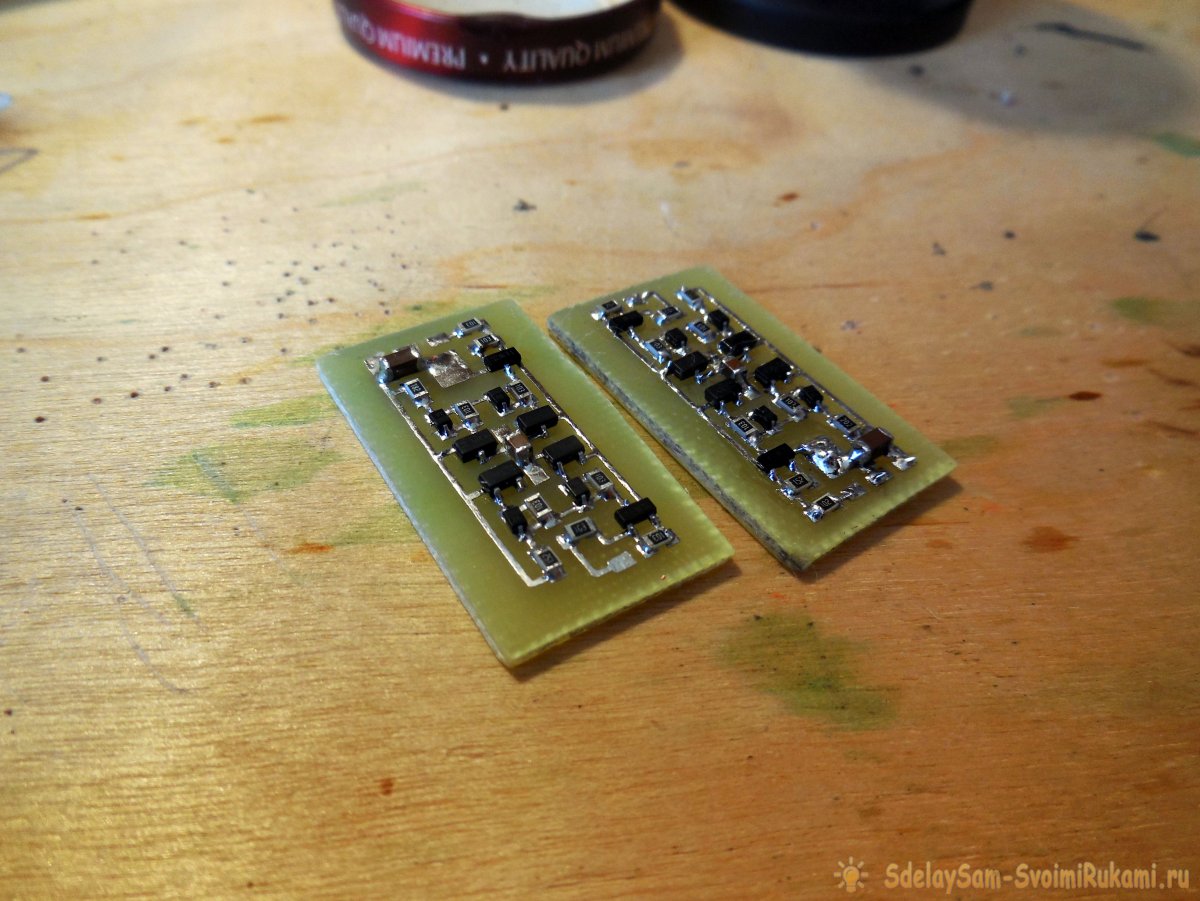
К данной схеме подключается двигатель, а также она содержит два входа – in1 и in2, подали 3-5 вольт на один вход – мотор вращается в одну сторону, подали 3-5 вольт на другой – мотор вращается уже в другую сторону. Если же напряжение не подаётся ни на один вход, либо подаётся на оба входа сразу – мотор не вращается, вот такая простая логика работы. На схеме имеется 4 полевых транзистора, которые будут коммутировать мотор, поэтому они должны быть рассчитаны на достаточно большой ток. Два из них N-канальные, можно использовать АО3400, другие два P-канальные, подойдут АО3401. Также на схеме присутствуют два биполярных NPN транзистора, подойдут BC847 или любые другие аналогичные. Для того, чтобы не занимать много места на шасси рекомендую собрать эту схему именно на SMD-компонентах. Диоды – любые понравившиеся, например, 1N4148W. На вход питания этой схемы (обозначен как 12 V) подаётся напряжение с преобразователя. Обратите внимание, что схему нужно собрать в двух экземплярах – для левого и правого мотора, соответственно питаться они будут с одного и со второго преобразователя. Фото собранных плат ниже.

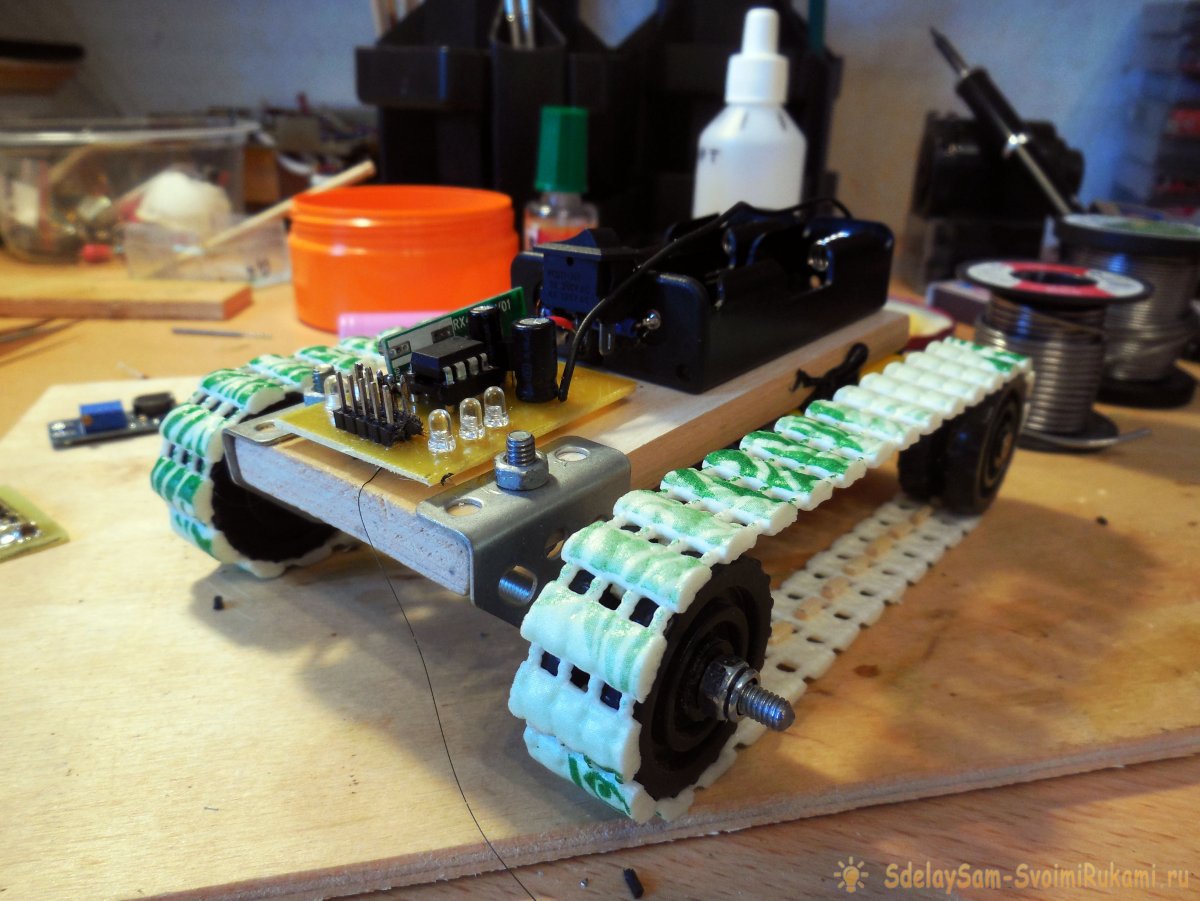
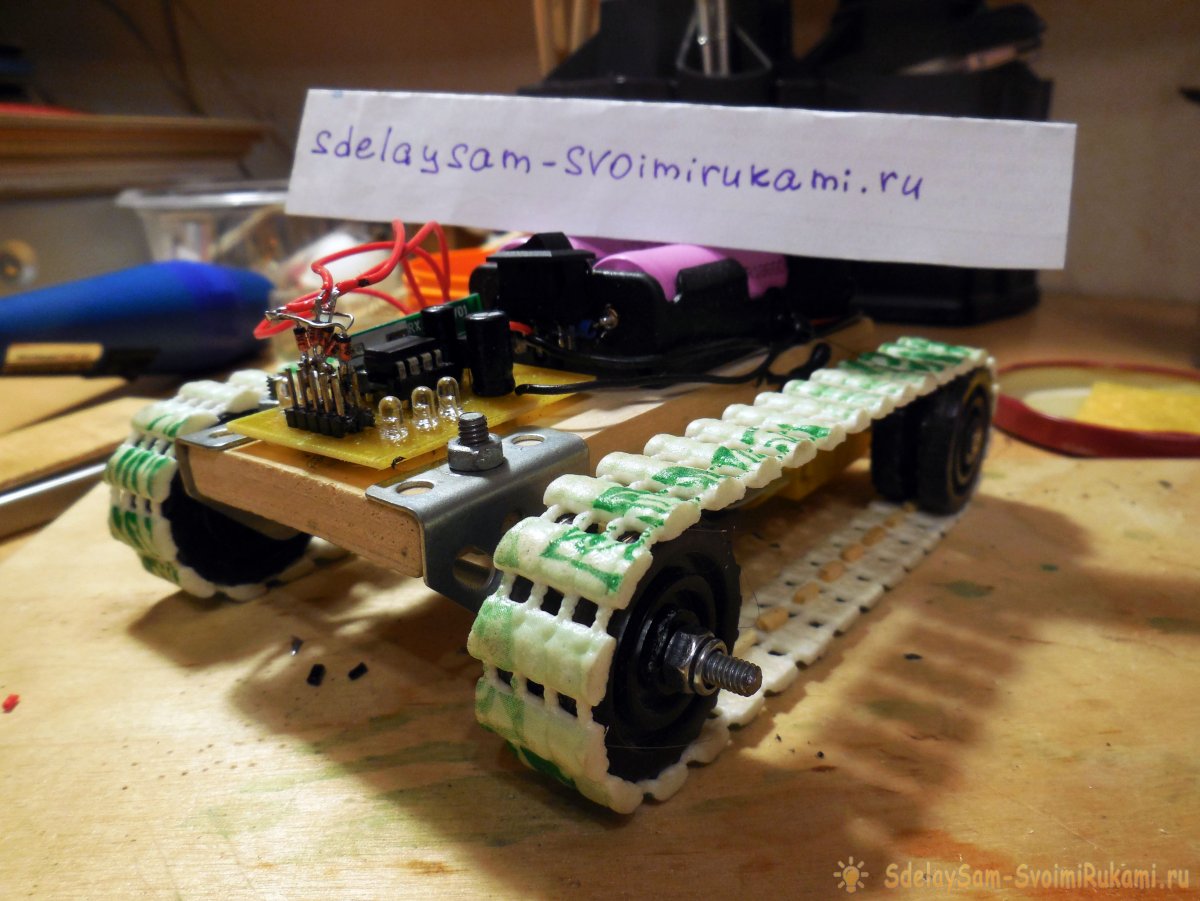
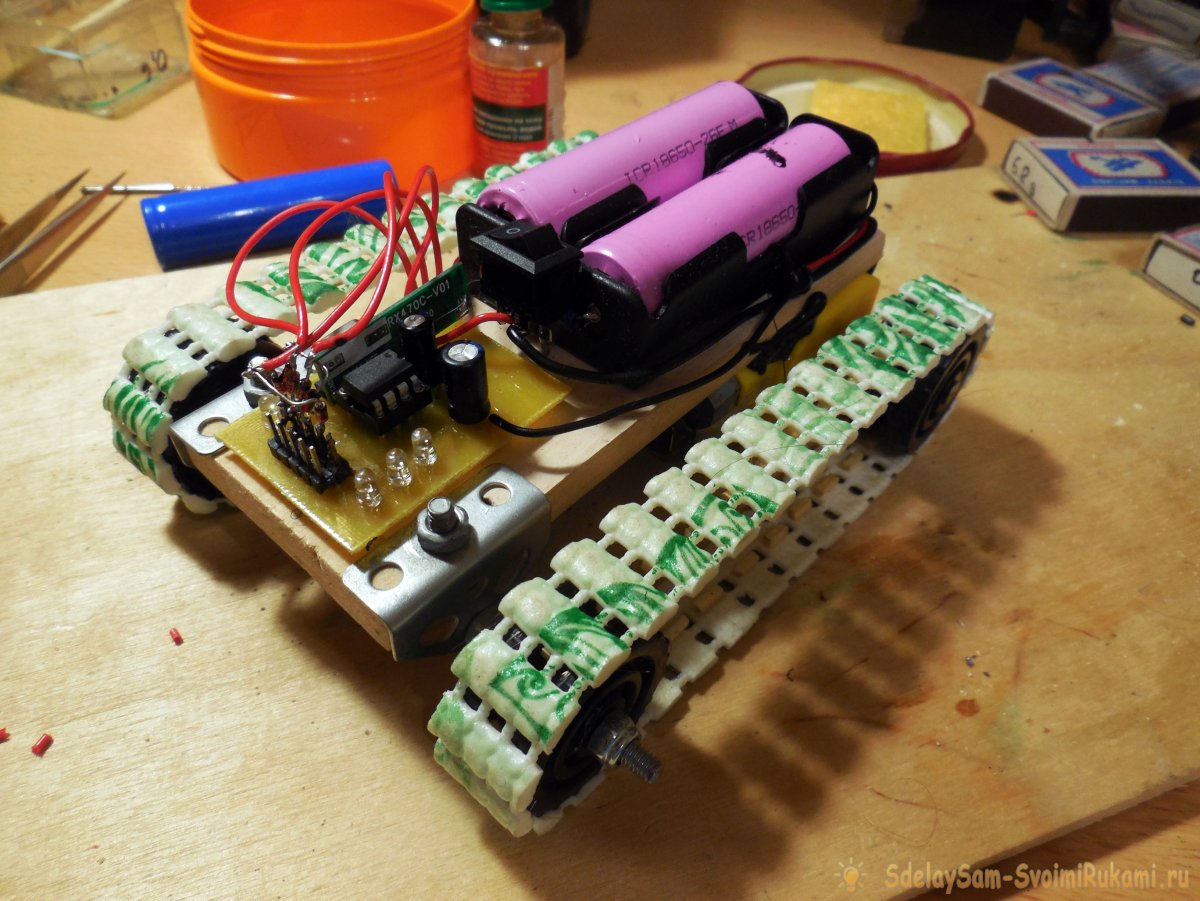
Теперь можно приступать непосредственно к монтажу – и первым делом стоит установить на верхнюю часть шасси пару холдеров под аккумуляторы 18650, именно от них будет питаться вся электроника, аккумуляторы соединяются параллельно.

Перед аккумуляторами, в передней части, устанавливается плата декодера, её сразу можно подключить через выключатель к контактам холдеров. Для удобства на этой плате дополнительно установлены 5 светодиодов – при нажатии на клавиши пульта будут загораться соответствующие светодиоды.
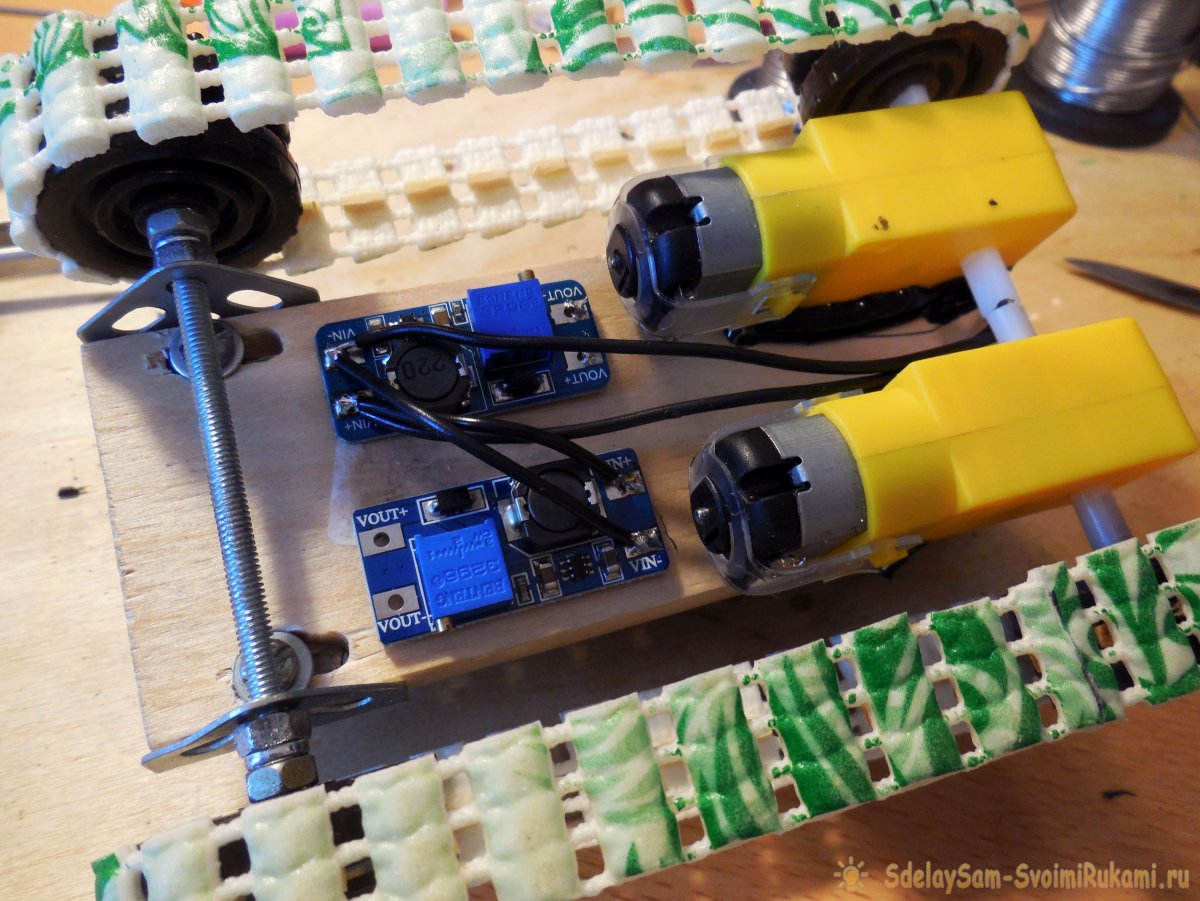
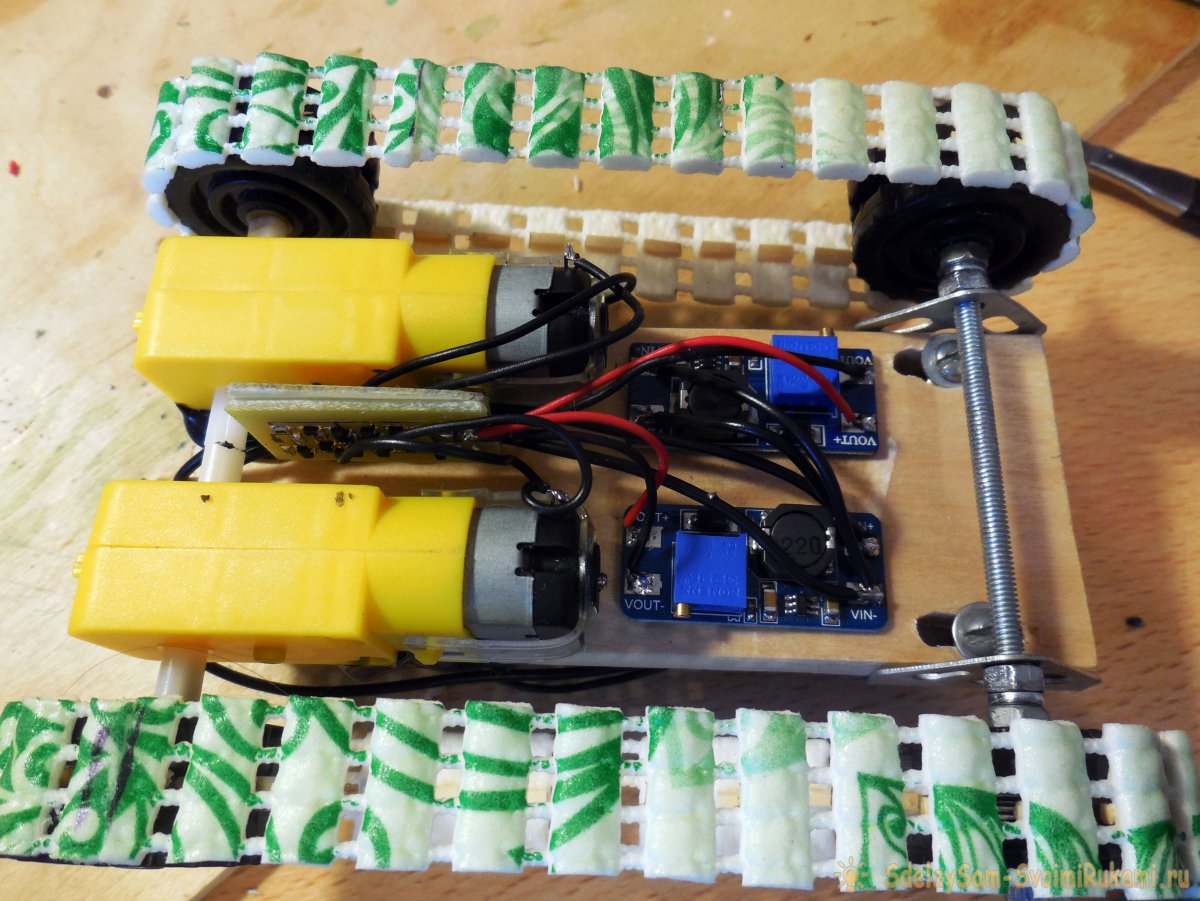
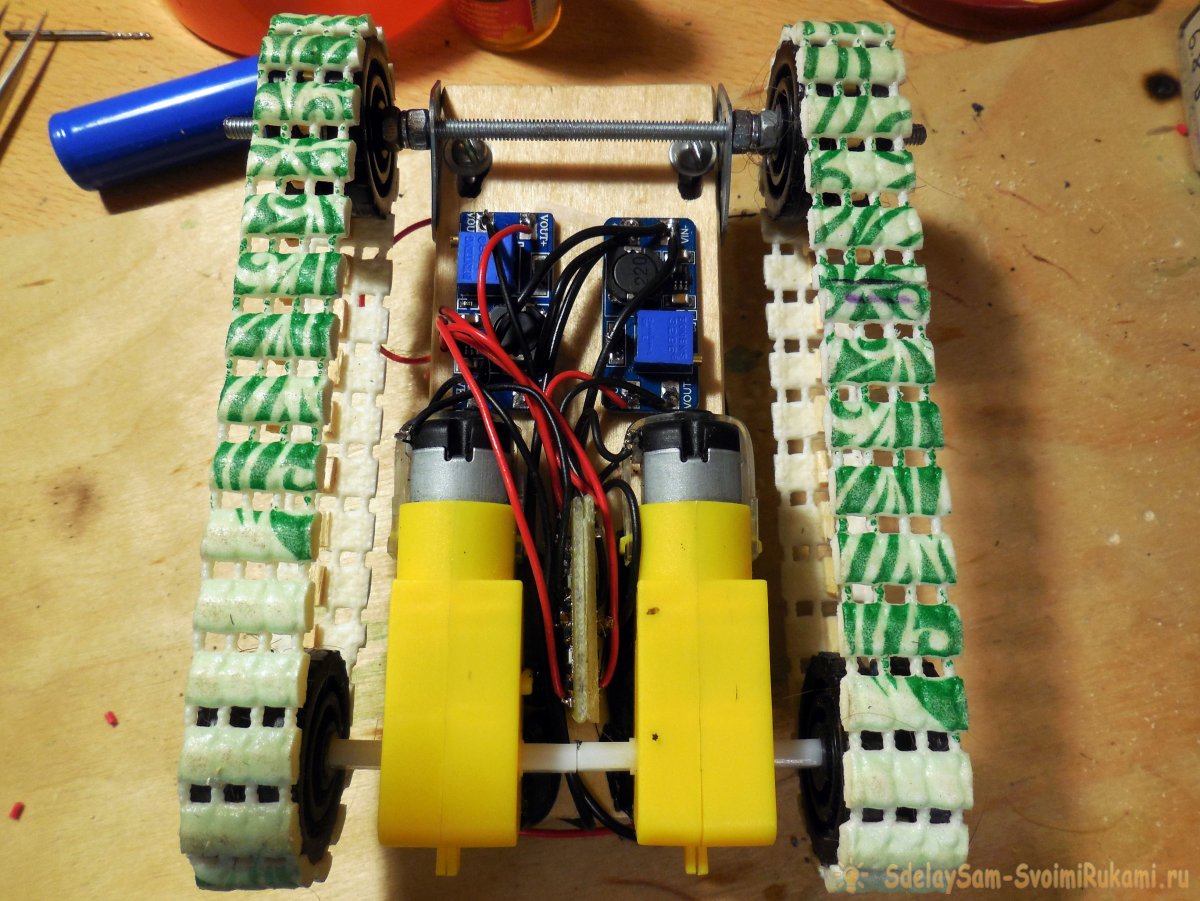
На нижнюю часть, под шасси, крепятся пара преобразователей и пара плат-мостов. Сразу всё соединяется проводами – входы преобразователей через выключатель к холдерам, выходы преобразователей на питание плат мостов, а выходы мостов, в свою очередь, уже к моторам. Следует учитывать, что моторы под нагрузкой могут потреблять достаточно большой ток, соответственно на входе преобразователей потребляемый ток будет ещё примерно в 2 раза больше и в некоторые моменты может достигать 1-1,5 ампера, поэтому нужно подводить питание достаточно толстыми проводами.
Остался последний, завершающий этап сборки – нужно подключить выходы декодера (будет задействовано 4 выхода из 5-ти) ко входам мостов (in1, in2), для того, чтобы при нажатии на определённые клавиши пульта машинка реагировала нужным образом. А именно:
- Нажатие «вперёд» – оба мотора вращаются в одну сторону.
- Нажатие «назад» - оба мотора вращаются в противоположную сторону.
- Нажатие «вправо» - левый мотор вращается вперёд, правый назад, машинка при этом разворачивается на месте по часовой стрелке.
- Нажатие «влево» - правый мотор вращается назад, левый вперёд, машинка разворачивается против часовой стрелки.
- Одновременное нажатие «вперёд» и «вправо» - левый мотор вращается вперёд, правый стоит на месте, таким образом, происходит плавный поворот.
- Одновременное нажатие «вперёд» и «влево» - аналогично, но в другую сторону.
Для реализации такой логики необходимо подключить выходы декодера ко входам мостов таким образом, как показано ниже.
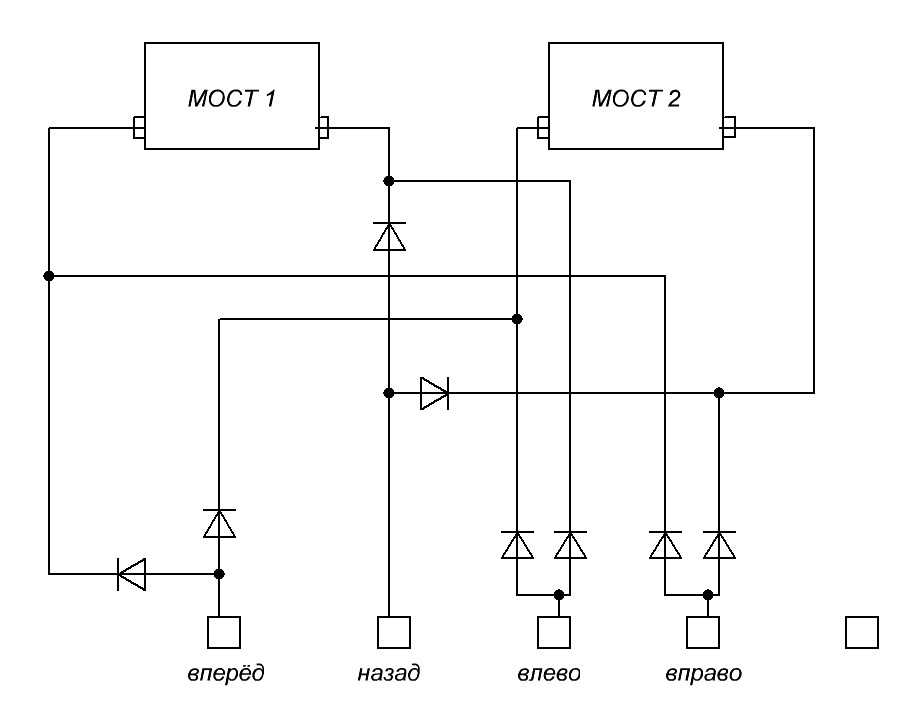
Снизу показаны выходы декодера, при этом один из них свободен, его можно задействовать для других действий. Диоды здесь можно использовать те же 1N4148, припаять их навесным монтажом прямо на выходах декодера.
Испытания
На этом сборка машинки завершена, можно вставлять аккумуляторы и проверять работу. При этом не лишним будет проверить ток потребления – при отсутствии команд с пульта он должен быть небольшим, около нескольких десятков мА. Дальность действия пульта будет зависеть от используемых модулей приёмника и передатчика – чаще всего они обеспечивают зону уверенного приёма около 20-30 метров в городских условиях, чего вполне достаточно для управления машинкой. Значительно увеличить дальность помогут антенны, можно взять кусочки медного провода длиной 17 см (для частоты 433 МГц) и припаять к модулям к контактам «ant».
Таким образом, получилась весьма занятная игрушка для детей и взрослых – гусеницы из ПВХ-коврика обеспечивают отличное сцепление с любыми поверхностями, поэтому машинка легко преодолевает препятствия. К преимуществам гусеничного варианта также можно отнести простоту управления – не нужно устанавливать дополнительные рулевые механизмы, всё управление происходит только за счёт смены направления вращения гусениц. Недостатком описанной конструкции шасси можно назвать маленький «дорожный просвет» - моторы располагаются под днищем и занимают там довольно много места, тем не менее, это не мешает получению удовольствия от «вождения», а при желании и этот недостаток можно устранить, добавив дополнительную ось для задних колёс и расположив моторы сверху. Удачной сборки!
















